Attitude Determination and Control System
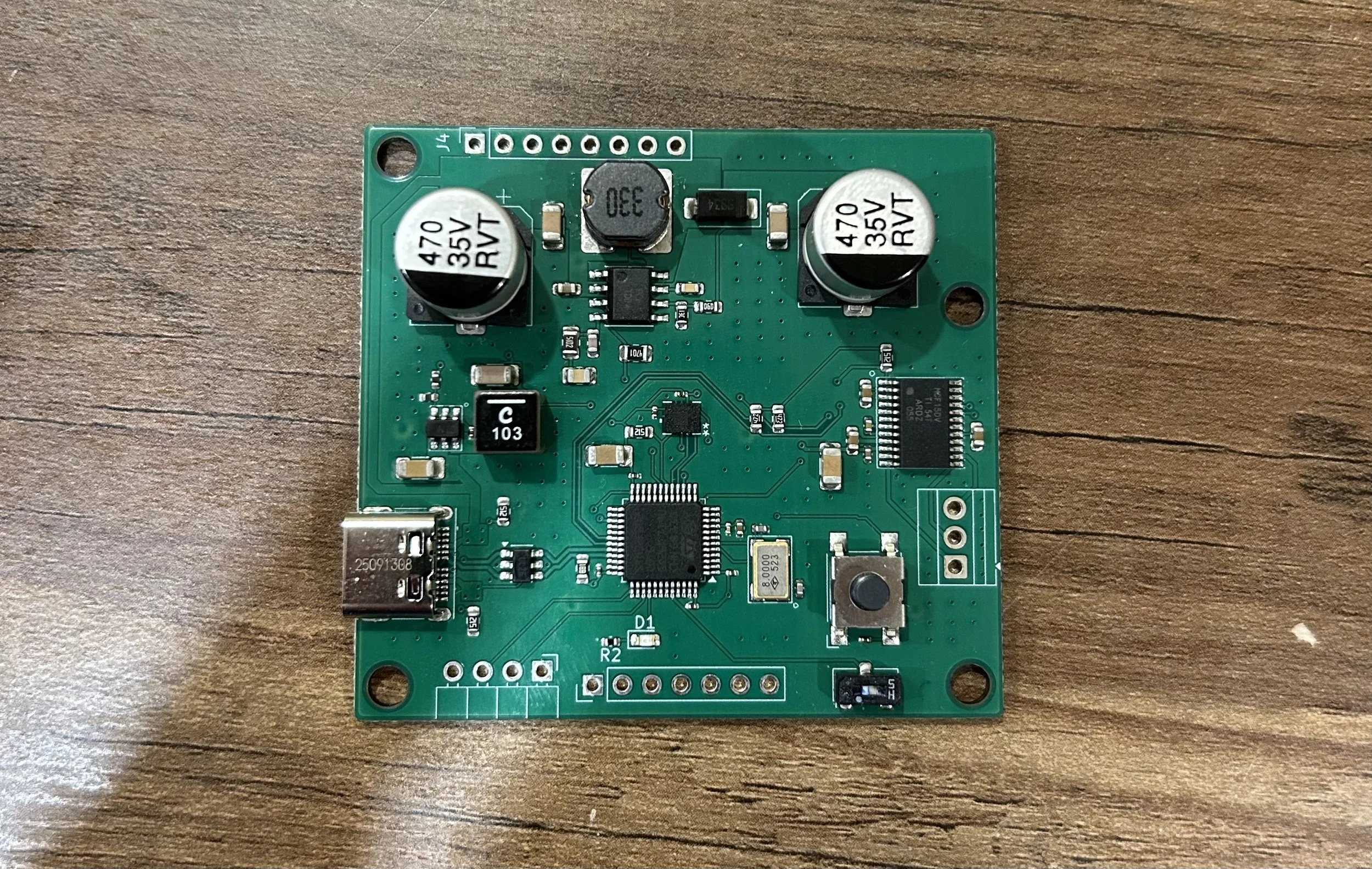
Primary Components
| Part Number | Description |
|---|---|
| STM32F302 | Microcontroller |
| DCP3601 | 3.3 V Buck Regulator |
| PAM2423 | 12 V Boost Converter |
| MCF8315 | Motor Controller |
| ISM330BX | IMU |
About
The aim of this project is to act as a 1-DOF attitude determination and control system. The user will command a direction from the user interface, and the system will use a reaction wheel to point in that direction.
This project takes inspiration from this paper, which uses a hard drive motor and platter as a reaction wheel. This allows focus to be put on the electronics and software, instead of building a well-balanced flywheel.
The system determines its position using the sensor fusion function of a 6-axis IMU to estimate the yaw position.
The system will be paired with the RF Transceiver in a future iteration. This will allow wireless command from the computer. The RF transceiver will be in charge of telemetry and command handling, while the ADCS will be responsible for maintaining the position commanded to it.
Status and Next Steps
The PCBA has been verified, and now the software is under the process of debugging. Once this is complete, A 3D-printed enclosure will be designed to house the system, and mount the hard-drive reaction wheel. Then the pointing algorithm will be verified.
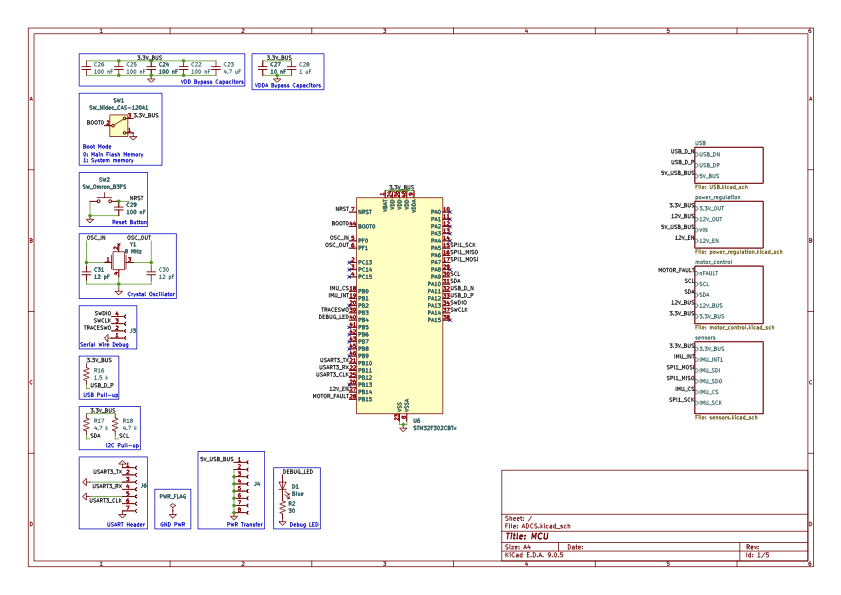
MCU
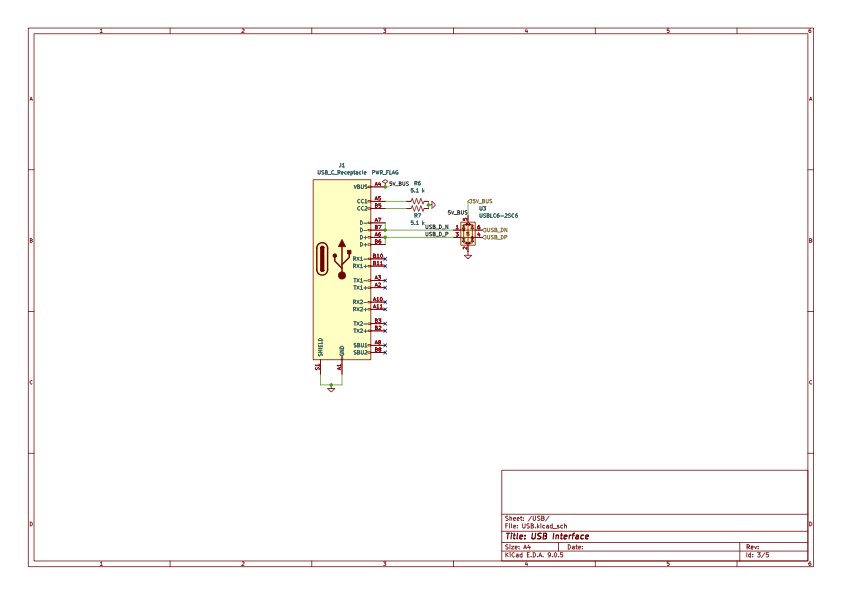
USB Interface
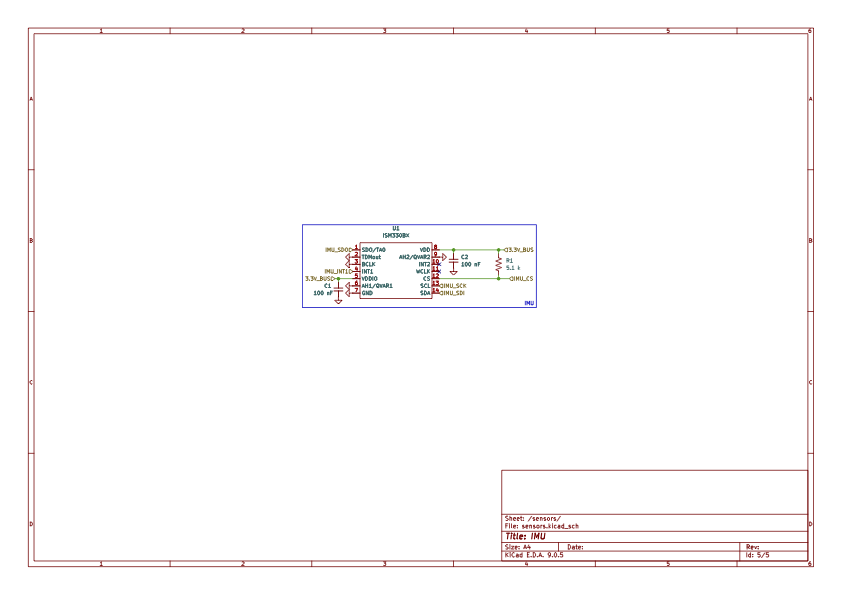
IMU
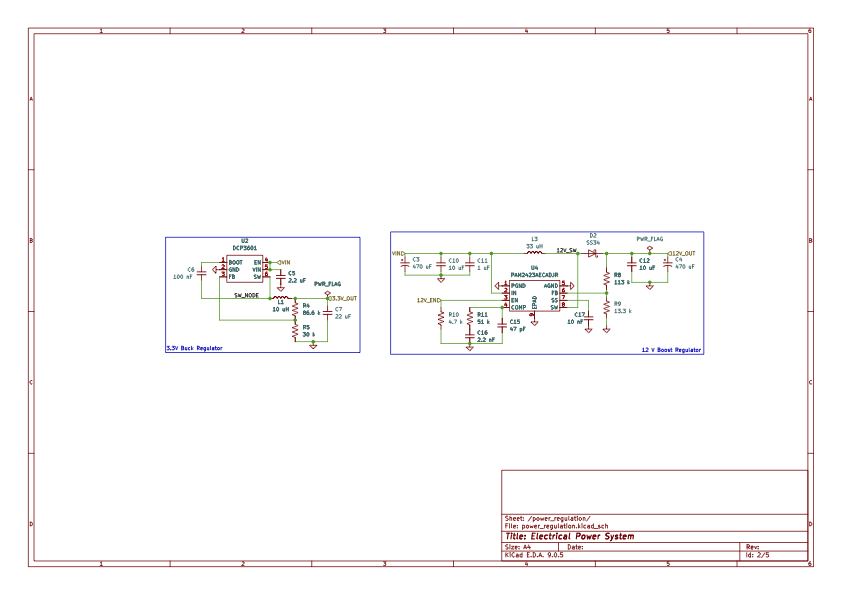
Electrical Power System
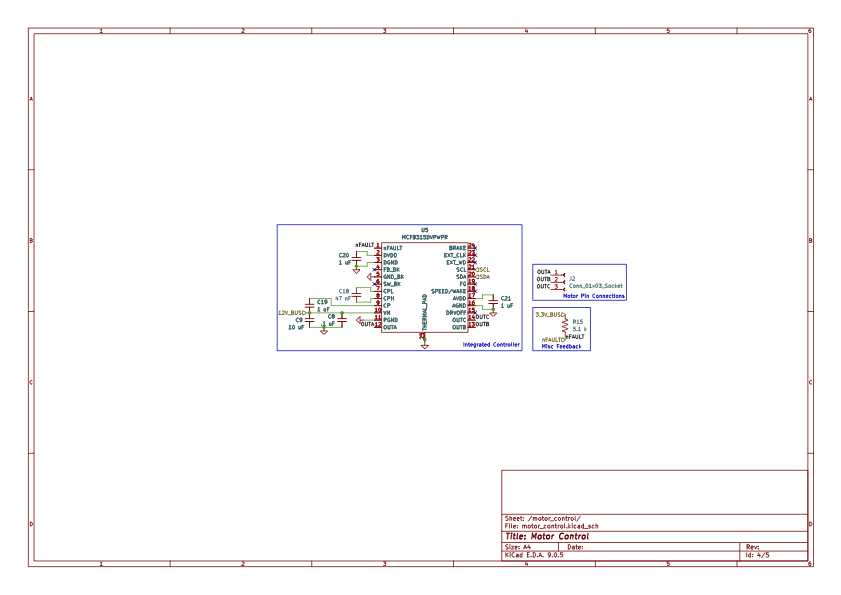
Motor Controller
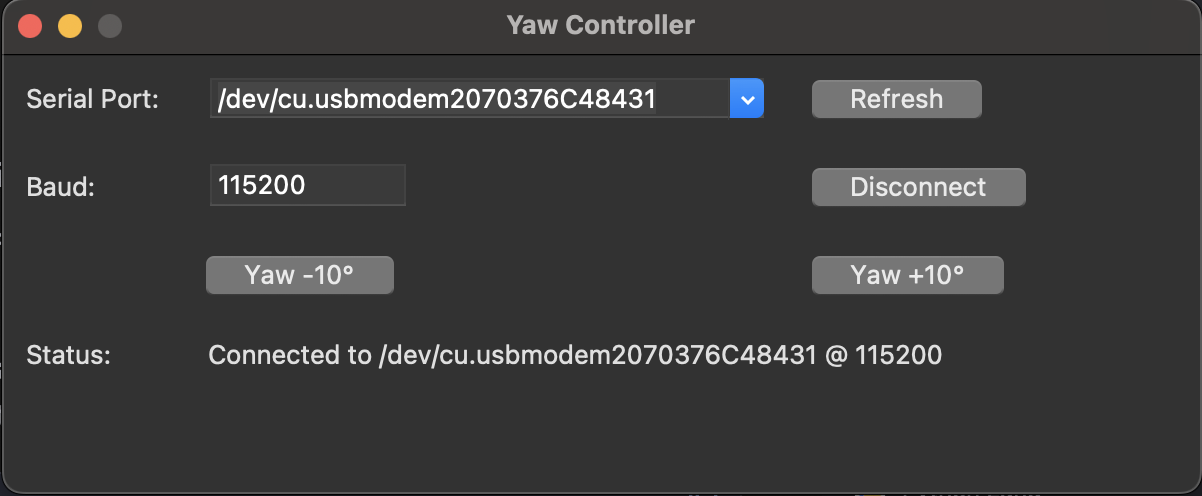
Barebones UI